In a previous blog post, I had mentioned Residual Connections in the context of Google-Neural Machine Translation. I was not completely familiar with the intuition behind Residual Networks then, so heres a short post on what I gathered after reading some literature.
Residual Networks first got attention after this paper – “Deep Residual Learning for Image Recognition” by some folks from Microsoft Research. They used what they called residual connections in Convolutional Neural Networks, obtaining 1st-place results at ILSVRC 2015. However, it turns out that their notion of why the networks achieved such great performance might have been flawed.
The original authors thought that the new connections allowed training of very deep neural networks (their state-of-the-art model had 152 layers) by ‘preserving’ gradient across layers during training. This, according to them, solved the Vanishing Gradient Problem. However, the paper “Residual Networks Behave Like Ensembles of Relatively Shallow Networks” challenges this, attempting to prove that Residual NNs actually behave like ensembles of neural networks!
Lets take this step-by-step.
First, lets establish some nomenclature. In a classic neural network, suppose the output from the 


Here, 


A typical layer in a Residual NN looks like this (taken from the original paper):
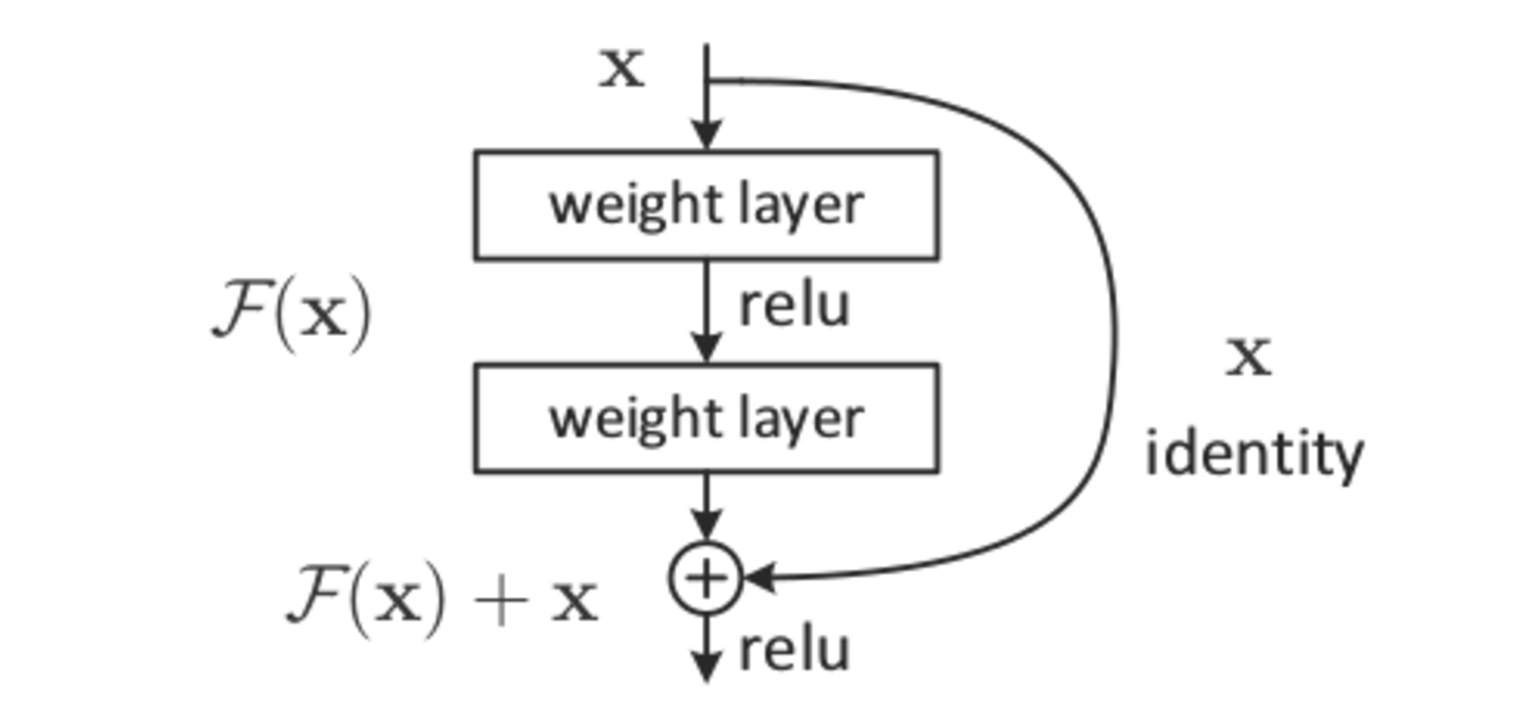
Based on our nomenclature, the expression for

The difference, as you must have noticed, lies in the second term on the Right-Hand-Side. This term is what they call the identity skip(or short-cut) connection. ‘Skip‘, because you are skipping the
These identity short-cut connections are what make residual NNs special.
‘Unravelling’ a Residual Neural Network
The reference paper‘s biggest insight lies in the way they look at equation (2) – that is, as a recursive definition. They call this unravelling the NN.
Lets consider a simple residual NN with three layers. The input can be denoted as 



Expanding equation (2) step-by-step, we would get



Equation (5) essentially defines
Contrast this with what we would see if it was a standard network:

(Ofcourse, the weights learnt would be different in each case)
Consider a situation where 

If this happens in equation (6), you see that there is very little 
But now consider equation (5). If

It looks like the input signal bypassed the second layer completely on its way to the output! In fact, if we did not have
And the ability to ‘skip’ is not just restricted to one layer per run- depending on the input and the weights at every level, any combination of them could be on/off for a given case. The name residual can be interpreted better now – residual can mean ‘unused’, which is pretty much what
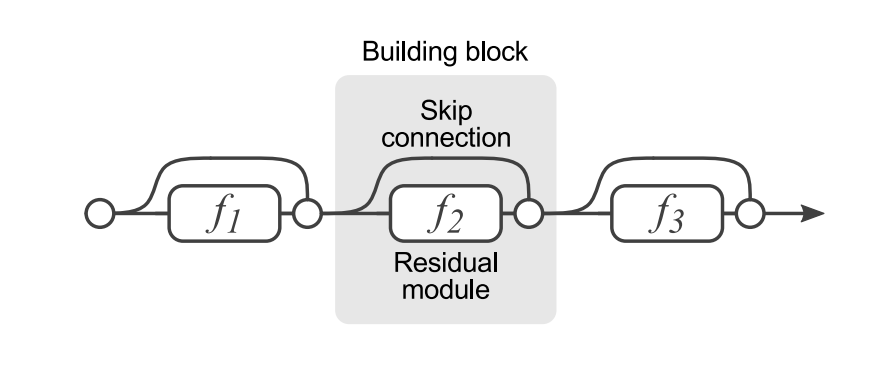
Diagrammatically, you could ‘unravel’ the network like this:

Each ‘path’ in the above figure denotes some combination of the layers working on
Ideally, every output would get significant contributions from every one of those paths. But that is not usually the case, as observed by the authors of the paper.
Now lets see what happens to the figure the moment you switch off

As you can see, even though
Intuitively, you can see why the authors think of this structure as an ensemble. At every single node (including the last one), there are multiple paths, any of which may or may not contribute to the overall output for a given scenario. You can say that every
And how many such paths are there? Its equivalent to the total cases resulting from every one of the layers being either on or off. Simple probability theory will tell you that its 

Unusual properties of Residual NNs
Thinking of residual NNs as ensembles motivated the authors to conduct some experiments to test their hypothesis. Essentially, what they tried to do is see which properties of ensembles residual NNs satisfy:
1. Resilience to layer deletion: In most Neural Networks (the ones that resemble equation (2)), deleting a layer has disastrous results on the outputs – whatever the size of the overall network may be. And for good reason, as you are disrupting the one term that corresponds to the output.
But that is not the case for Residual Neural Networks. In fact, deleting 1 (or even 2 or 3) layers in large residual NNs introduces only around 6-7% of an error into the performance of the network! Moreover, deleting more and more layers actually has a pretty smooth (as in mathematically smooth) effect on the total error:

This is pretty close to how an ensemble behaves – deleting models from an ensemble does introduce error, but the increase is never drastic with respect to the number of models removed.
This can be explained easily by looking at equation (5). Even if you delete one layer from a residual NN, that still leaves 
2. Shortening of effective paths: This is actually contradictory to what people first believed about residual NNs – that they promote deeper networks.
During training, the authors observed that the updates were not happening uniformly across all layers, as they would for normal NNs. Every training point would adjust the weights along a specific set of ‘paths’ as shown in the unravelled diagram. And most of these paths, even with 152-layer deep networks, were only 20-30 levels deep!
Even on-line, every input activated only a specific set of paths without taking significant contributions from every single layer and path in the network.
This is where the biggest revelation lies: Residual NNs work better not by increasing the effective paths, but actually reducing them! What works here is that every input has a chance to take its own unique set of paths to the output, without having to go through every single layer.
This is again similar to how ensembles are trained and run. During training, you won’t observe all smaller models in an ensemble getting significantly adjusted for every training point. On-line, there will always only be a subset of models that give a strong output for any input.
Thats it for now! Do read the reference paper if you feel interested, or go through the original paper to see their usage in the image processing scenario.
